|
|
ООО "Лаб127"
|
|
EvAAL-2013
В июле 2013 г. команды из Франции, Португалии, Италии, Германии и России собрались в Мадриде (Испания) для участия в соревновании по точности позиционирования - Evaluating AAL Systems through Competitive Benchmarking (EvAAL-2013). Мадридское соревнование, в котором участвовала команда разработчиков RealTrac, стало третьим соревнованием, проводимым в рамках инициативы EvAAL. В данном соревновании участвуют технологии, предназначенные для построения систем AAL (ambient assisted living). В качестве полигона для оценки технологий использовалась лаборатория "умный дом" Мадридского политехнического университета. Полигон представляет собой одноэтажное здание с гостиной, спальней, кухней, ванной, верандой и служебной комнатой. В "умном доме" имеется обычная бытовая техника (телевизор, холодильник, микроволновка и т.п.). Кроме того, он оборудован набором датчиков (датчики дыма, огня, затопления, открытия окон и дверей), которые объединены в общую сеть и доступны для мониторинга тестируемой системой позиционирования. 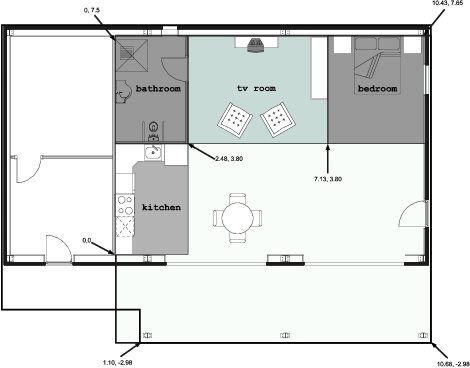
Рис.1. Схема лаборатории "умный дом"
При оценке технологий принимается во внимание не только собственно точность позиционирования, но и такие параметры, как стоимость, сложность разворачивания, интероперабельность и др. А именно, оцениваемым критериям назначаются следующие веса:
Точность системы позиционирования оценивалась в три фазы. Во-первых, система позиционирования должна была определить область, в которой находится объект (кухня, ванна и т.п.). Во-вторых, система позиционирования должна была оценивать положение пользователя в реальном времени в отсутствие помех. В-третьих, система позиционирования должна была определять положение пользователя в присутствии других людей, перемещающихся по полигону. Каждая точка измерений, выданная системой позиционирования, сравнивалась с эталонным значением. Для замеров рассчитывалась погрешность \(P\) с доверительным интервалом 75 %. Балл данного критерия вычислялся следующим образом: $$ точность = \left\{ \begin{array}{ll} 10 & если \quad P \leqslant 0.5 м\\ 12-4P & если \quad 0.5 м < P \leqslant 2 м\\ 8-2P & если \quad 2 м < P \leqslant 4 м\\ 0 & если \quad P > 4 м\\ \end{array}\right. $$ Для разворачивания системы позиционирования организаторы предоставляли разработчикам 1 час. Исходя из фактически затраченного на исталляцию времени формировалось значение показателя "сложность инсталляции". Площадь "умного дома" составляла 121 \(м^2\). Для разворачивания системы RealTrac были использованы 4 беспроводных базовых станции (на схеме обозначены цифрами 1–4). Также использовалась одна проводная базовая станция (5) в качестве шлюза, пересылающего данные из беспроводного сегмента на сервер. У команды RealTrac на инсталляцию системы ушло чуть более двух минут. 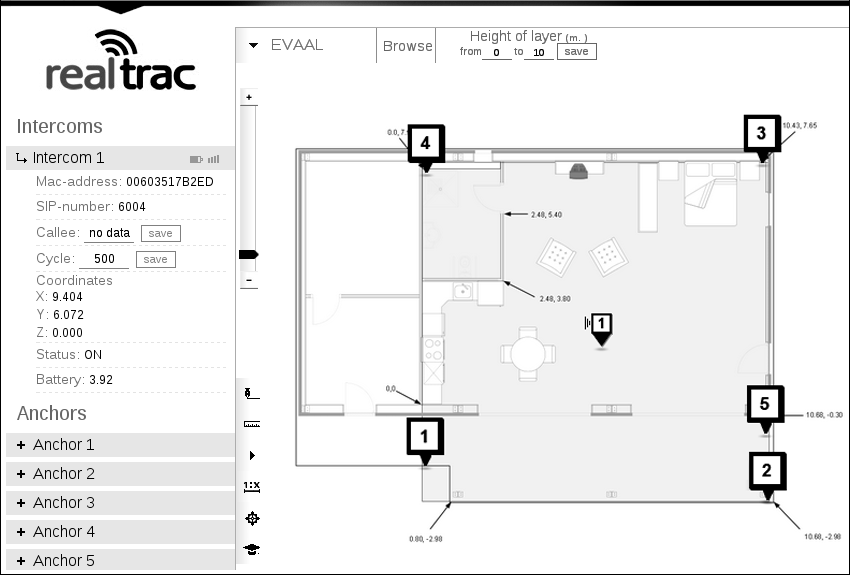
Рис.2. Схема размещения базовых станций RealTrac
Если технология позиционирования предусматривает использование мобильных тегов, то по окончании инсталляции, такой тег выдавался подопытному пользователю, участвующему в эксперименте. Пользователь получал инструкции, как закрепить или держать тег. Что касается системы RealTrac, то для используемых тегов нет специфических ограничений по размещению или ориентации тегов. Далее пользователь двигался по предписанной ему траектории, останавливаясь в определённых точках. Действительная траектория движения пользователя участникам не ракрывалась. Описанные выше три фазы повторялись дважды. Выбиралась лучшая оценка из двух случаев. 
Рис.3. Франческо Поторти
в качестве подопытного пользователя движется по заданной траектории
Далее оценивались два других критерия: доступность и восприятие пользователем. Для оценки использовались опросники. При этом принимались во внимание многие аспекты оцениваемых систем позиционирования: размер устройств, время зарядки, возможность использования в контексте свободного ПО и др. Успешно была выполнена интеграция системы RealTrac с программным обеспечением организаторов соревнований. Для соревнований было написано небольшое дополнение, которое с периодичностью 0.5 с выполняло запросы к RealTrac-серверу посредством протокола RTLSCP, преобразовывало результат в текстовые строки, которые через TCP-соединение отправлялись оценивающему ПО. С учётом всех критериев итоговая таблица соревнований выглядит следующим образом:
Технология RealTrac показала самые лучшие результаты по точности и в итоге выиграла соревнования по общему счёту.
Более подробно особенности, ход и результаты соревнований описаны в статье: Moschevikin, A. P. RealTrac Technology at the EvAAL-2013 Competition [Text] = Технология RealTrac на соревновании EvAAL-2013 / A. P. Moschevikin, A. S. Galov, A. S. Volkov [et al.] // Journal of Ambient Intelligence and Smart Environments. – 2015. – V. 7. – P. 353-373. - DOI: 10.3233/AIS-150318
|



