В 60-х годах развитие вычислительной техники привело к необходимости стандартизировать не только размеры модулей, но и каналы связи между ними. Это было сделано к 1969 году, когда опубликовали европейский стандарт EUR-6100 на модульную систему КАМАК, разработанную ядерными электронщиками ведущих европейских институтов для оснащения сложных экспериментов, например, на ускорителях атомных частиц. Одно из прочтений слова САМАС - Computer Applications for Measurements And Control - применение компьютеров для измерений и управления.
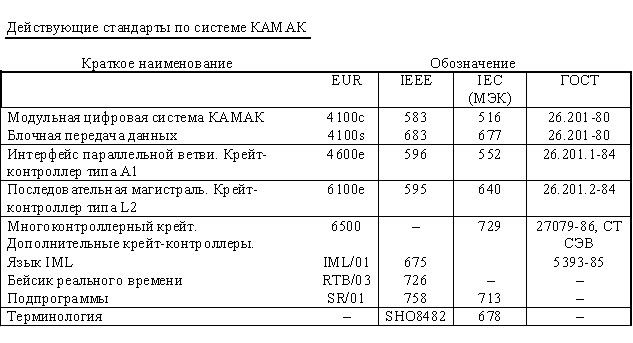
Система САМАС (КАМАК) разработана и предложена комитетом ESONE, подготовившим подробные спецификации и выпустившим стандарты, которые приняты также основными международными и отечественными организациями но стандартизации (табл).
Основными особенностями системы являются: модульный принцип построения; конструктивная однородность, обеспечиваемая использованием унифицированных конструкции, включая крейт для размещения функциональных модулей; магистральная структура информационных связей междуфутштопальными блоками; программное управление.
В системе нормализованы конструктивы, электрические сигнала и логика, терминология. Стандарт на электрические сигналы определяет напряжение питания, уровни логических сигналов и допустимые нагрузки на входе и выходе сменного блока. Логический стандарт нормализует функции сигналов, их временные зависимости и расположение на соединителях.
Kpeйт является основным конструктивом системы и имеет следующие размеры (в мм): ширину внешнюю - 477, внутреннюю - 430; высоту, внешнюю - 221,5, внутреннею - 200; глубину минимальную - 360, рекомендуемую - Е 25. Он содержит не более 25 станций с шагом 17,2 M.V для установки сменных блоков. На каждой станции имеются верхняя нижняя направляющие для соответствующих полозьев сменного блока, розетка 86-контактного соединителя, отверстие с резьбой для фиксирующего винта сменного блока.
Функциональные блоки (модули) выполняются сменными и устанавливаются в крейте. Каждый сменный блок занимает одну (1 М) или несколько станций (позиций). Станция обеспечивает его прямое подключение к магистрали крейта. Сменный блок состоит из следующих основных частей: задней и передней панели с фиксирующим винтом; стяжек, верхнего и нижнего полозьев; вилки 86-контактного соединителя, составляющей обычно часть печатной платы или устанавливаемой на задней панели.
Для сменных блоков, занимающих более одной станции в крейте, допускается использование более одного набора полозьев и более одной вилки. Контакты вилки расположены с нагом 2,54 мм с двух сторон печатной платы (по 43 контакта с каждой стороны).
Стандарт распространяется па модульную стационарную аппаратуру системы КАМАК и устанавливает требования к конструкции, электрическим сигналам, питанию и логике обмена информацией, которые обеспечивают совместимость блоков с крейтом и между собой. Стандарт полностью соответствует публикации МЭК 516, за исключением требований, относящихся к применению блоков.
Интерфейс предназначен для организации многокрейтовых систем на основе машиннонезависимой MB с применением бит-параллельного асинхронного способа обмена информацией.
Стандарт ГОСТ 26.201 I-84 устанавливает требования к составу и структуре интерфейс,-! электрическим сигналам и логике обмена информацией, который обеспечивают совместимость крейтов КАМАК, содержащих сменные функциональные блоки и контроллер, с одним устройством управления MB (далее ДВ) и между собой, а также основные требования к унифицированному ВКК, обеспечивающему совместимость крейта с MB.
Стандарт соответствует публикации МЭК 522.
Аппаратная часть интерфейса включает ВКК. Для MB; ДВ; устройства согласования (УС). Число ВКК, подключаемых к магистраль-кому каналу и доступных при обмене информацией ДВ, не более 7. Обмен информацией осуществляется последовательной передачей бит-параллельных слов с разрядностью слова не более 24 бит по двунаправленной шине данных MB.
Подключение ВКК и ДВ к магистральному каналу производится через 132-контактный соединитель (с установленным назначением каждого контакта), обеспечивающий подсоединение 65 сигнальных линий 65 соответствующих им обратных линий и двух линий экрана кабеля
В ВКК предусмотрено два режима работы: системный и автономный. В автономном режиме ВКК, оставаясь физически подключенным к магистральному каналу, не участвует в операциях ветви и не оказывает влияния на их прохождение. ДВ должен иметь средства для идентификации контроллеров, находящихся в системном режиме.
На MB выполняются два вида операций: командные и обработки требований. Во время командных операций ДВ генерирует команду, содержащую в общем случае: адресную информацию для выбора" одного или нескольких ВКК, данные и информацию о функции, подлежащей исполнению. Каждый адресованный ВКК осуществляет прием команды с MB и генерирует соответствующую операцию на МК по ГОСТ 27080-86. При исполнении команды чтения адресованный модуль устанавливает на тине <Чтение> МК данные, которые ретранслируются ВКК на тину данных MB и принимаются ДВ. При исполнении команды записи ДВ генерирует на шину данных MB данные, которые ретранслируются ВКК на шину <Запись> МК и принимаются адресованным модулем. Во время других командных операций передача данных по магистральному каналу не производится.
Операция обработки требований выполняется для обслуживания ДВ запросов от модулей крейтов по L-сигналам и может быть двух видов: без идентификации и с идентификацией источников запросов. Операция обработки требований без идентификации источников запросов заключается в фиксации ДВ сигнала <Запрос ветви>, образованного КК путем объединения L-сигналов от модулей.
Операция обработки требований с идентификацией источников запросов инициируется ДВ (как правило, в ответ на получение им сигнала <Запрос ветви>) установкой на MB сигнала <Сортировка запросов>, который адресован ко всем КК, находящимся в системном режиме работы. При получении этого сигнала каждый ВКК должен сформировать из своих L-сигналов 24-разрядное слово запросов. Слова запросов от всех КК объединяются на тине данных MB и передаются в ДВ для идентификации 24 различных запросов от модулей.
Процесс передачи информации для всех видов операций на MB осуществляется по принципу <запрос - ответ> с использованием специальных синхронизирующих сигналов, обеспечивающих автоматическое управление операцией с учетом реальных временных задержек в работе устройств системы.
Запуск системы осуществлялся по единственному сигналу общего управления, поступающему на МК через соединитель MB.
Интерфейс предназначен для организации многокрейтовых пространственно-распределенных систем, в которых используется побайтно-последовательный или поразрядно-последовательный синхронный способ обмена информацией по однонаправленной замкнутой линии передачи.
В стандарте на интерфейс установлены требования к структуре интерфейса, логике обмена информацией, форматам сообщений и электрическим сигналам, обеспечивающим совместимость крейта КАМАК, содержащих ПКК, с ДПМ и между собой. В стандарте установлены требования к унифицированному ПКК типа L2, обеспечивающему совместимость с ПМ и взаимозаменяемость ПКК.
Интерфейс многоконтроллерного крейта (ГОСТ 27079-8G) предназначен для построения однокрейтовых систем распределенного управления на базе технических средств КАМАК. Интерфейс обеспечивает согласование операций основною контроллера крейта (ОКК) с операциями одного или нескольких ДКК. каждый из которых размещен в одной или более нормальных станциях.
Любой ДКК имеет средства доступа к линиям N и L для управления операциями МК, а также возможности участия в арбитраже захвата управления МК. Доступ к N и L обеспечивается через МДКК, ОКК и управляющую станцию, для чего каждый КК имеет на задней панели соединитель для подключения МДКК.
Современные и перспективные магистрально-модульные мульти-процессорные системы (ММС) и ВС и СОД базируются на интер-фейсах, которые по архитектуре и функциональным возможностям значительно отличаются от системных интерфейсов ЭВМ типа <Об-щая шина> (первое поколение) и поэтому часто называются интер-фейсами второго поколения или интерфейсными системами.
Интерфейс в системах рассматривается как способ организации средств передачи информации между отдельными подсистемами, рег-ламентирующий дисциплину работы и эффективность функциониро-вания системы в целом.
Интерфейсы, как правило, содержат несколько магистралей, часть которых обеспечивает высокое быстродействие при взаимодействии модулей внутри блоков, а другая часть - обмен информацией между блоками. При этом основная магистраль ориентирована на объедине-ние внутри блока в единый комплекс нескольких модулей процессо-ров, модулей оперативного запоминающего устройства (ОЗУ), контроллеров внешнего запоминающего устройства (ВЗУ) и др.