Мобильные носимые устройства содержат большинство доступных на рынке инерциальных
датчиков: это и датчики атмосферного давления, и акселерометры, и гироскопы. Помимо
традиционных задач инерциальной навигации, то есть задач восстановления траектории
движения и позиционирования, измерения от этих датчиков можно использовать для
определения типа движения.
Данные о типе активности, предпринимаемой в данный момент носителем устройства,
могут использоваться для задач наблюдения за объектом и обнаружения экстренных
ситуаций. Ещё одним преимуществом является возможность выключения отдельных
датчиков или перевода их в режим низкого энергопотребления. Например, можно
значительно снижать период отправки данных о локации по беспроводной сети или
полностью выключать GPS-приёмник тогда, когда носитель устройства данных неподвижен,
то есть находится в стационарном состоянии. Благодаря данным о типе перемещения
можно распознать среду нахождения пользователя, увеличив точность лоцирования.
Примерами таких средоориентированных типов движения являются подъём или спуск
в лифте, подъём или спуск по ступенькам, бег (так как человек не может развить
достаточную скорость в замкнутых, тесных пространствах) и ряд других.
Предлагаемый алгоритм не зависит от места крепления устройства сбора данных
и его ориентации относительно тела человека, в нём используется один блок
трёхосевых инерциальных датчиков. В этих условиях становится возможным только
базовая классификация типов движения. Исходя из вышеозначенных положений
производится классификация типа движения среди четырёх видов: ходьба, бег,
состояние покоя или состояние подъёма/спуска по лестнице.
Для классификации используются следующие информационные сигналы:
Длины векторов ускорения \(|a|\) и угловой скорости \(|w|\), вычисляемые как
$$ |a| = \sqrt{a_x^2 + a_y^2 + a_z^2}, $$
$$ |w| = \sqrt{w_x^2 + w_y^2 + w_z^2}, $$
где \(a_i\) и \(w_i\) – ускорение и угловая скорость, измеренные на
соответствующих взаимноперпендикулярных осях акселерометра и гироскопа.
Величина ускорения в горизонтальной плоскости
$$ |a_{horiz}| = \sqrt{a_{x_{GF}}^2 + a_{y_{GF}}^2}, $$
где \(a_{i_{GF}}\) – измеренное ускорение в горизонтальной плоскости,
связанной с системой координат NED (север, восток, низ). Перевод измерений
из системы координат устройства в систему координат NED осуществляется путём
умножения вектора измерений в системе координат устройства на матрицу вращения
\(R_m\). Предполагается, что задача разрешения ориентации устройства уже решена
ранее каким-либо из известных методов.
Вертикальное ускорение за вычетом значения ускорения свободного падения,
вызванного силой тяжести
$$ a_{vert_{GF}} = a_{z_{GF}} - g, $$
где \(a_{z_{GF}}\) – ускорение, измеряемое акселерометром и представленное
в глобальной системе координат, \(g\) – значение ускорения свободного падения
в текущей точке пространства.
Задача классификации состоит в определении состояния некоторой переменной
на основании производных от неё наблюдений. Указанные выше информационные
сигналы были исследованы следующим образом.
Сначала все временные ряды информационных сигналов были разбиты на окна
размером 128 и 256 элементов c 50 % перекрытием. С учетом того, что данные
собирались с частотой 100 Гц, каждое окно содержало данные за период от 1.28
до 2.56 с. Данного времени вполне достаточно для того, чтобы надежно определять
тип движения даже при небольших перемещениях.
В каждом окне из сигнала извлекались следующие характеристики:
Среднее.
Дисперсия, или стандартное отклонение.
Максимальное значение.
Минимальное значение.
Число пересечений нуля.
Главная частотная компонента сигнала (при помощи быстрого преобразования Фурье).
Энергия спектра (сумма квадратов коэффициентов быстрого преобразования Фурье).
Задержка между сигналами \(a_{horiz}\) и \(a_{vert}\) при помощи расчета их взаимной кросс-корреляции.
Линейная корреляция сигналов \(a_{horiz}\) и \(a_{vert}\).
Для каждой характеристики были построены гистограммы распределени, был проведён
гистограммный анализ и сделаны следующие заключения.
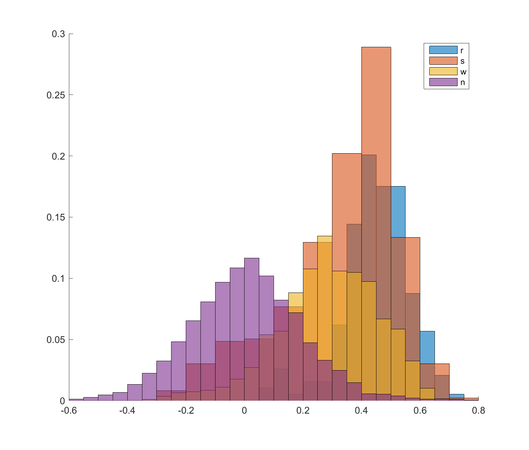
Корреляция между вертикальной и горизонтальной компонентами ускорения
имеет достаточно хорошую информационную ценность для отделения ходьбы от подъёма
по лестнице. На графике видно, что вероятность нахождения в состоянии подьём/спуск
по лестнице при значении коэффициента корреляции 0.5 составляет около 30 %,
в то время как вероятность нахождения в состоянии ходьбы не превышает 10 %
для интервала 0.3–0.6.
Рис.1. Корреляция между вертикальным и горизонтальным ускорением.
По оси Y – вероятность, по оси X – рассчитанное значение указанной
характеристики. Синяя гистограмма (r) – бег, оранжевая (s) – подъём
или спуск по лестнице, песочно-жёлтая (w) – ходьба, фиолетовая (n) –
состояние покоя.
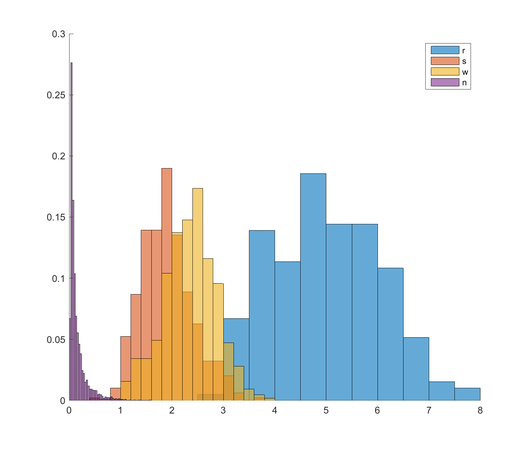
Среднее вертикальной компоненты ускорения позволяет хорошо отделить состояния
стационарности и бега от ходьбы и подьёма/спуска по лестнице. Преимуществом
использования данной характеристики для разделения состояний ходьбы и подъёма/спуска
по лестнице является одинаково небольшое значение дисперсии при удалённости
среднего друг от друга практически на величину этой дисперсии.
Рис.2. Среднее вертикального ускорения.
По оси Y – вероятность, по оси X – рассчитанное значение указанной
характеристики. Синяя гистограмма (r) – бег, оранжевая (s) – подъём
или спуск по лестнице, песочно-жёлтая (w) – ходьба, фиолетовая (n) –
состояние покоя.
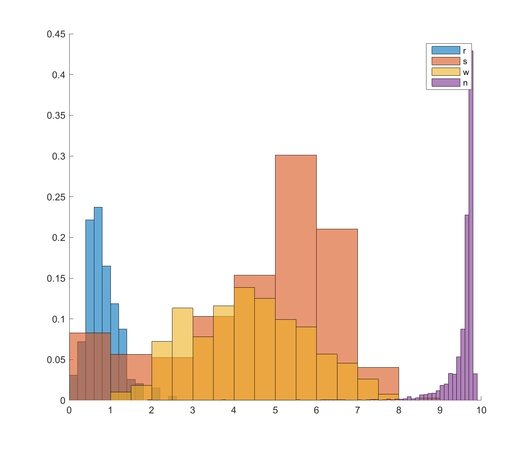
Распределение минимального значения магнитуды ускорения при
подьёмах/спусках по лестнице не является нормальным.
Рис.3. Минимальное значение магнитуды вектора ускорения.
По оси Y – вероятность, по оси X – рассчитанное значение указанной
характеристики. Синяя гистограмма (r) – бег, оранжевая (s) – подъём
или спуск по лестнице, песочно-жёлтая (w) – ходьба, фиолетовая (n) –
состояние покоя.
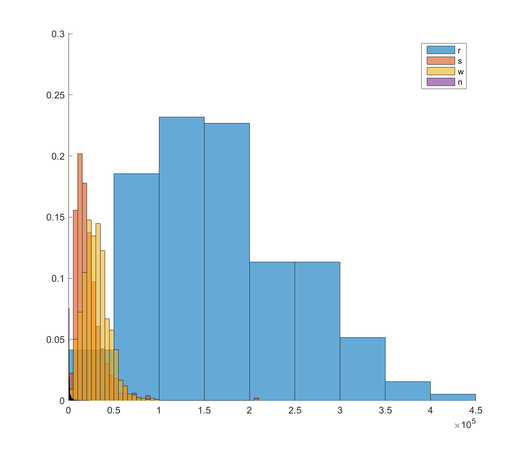
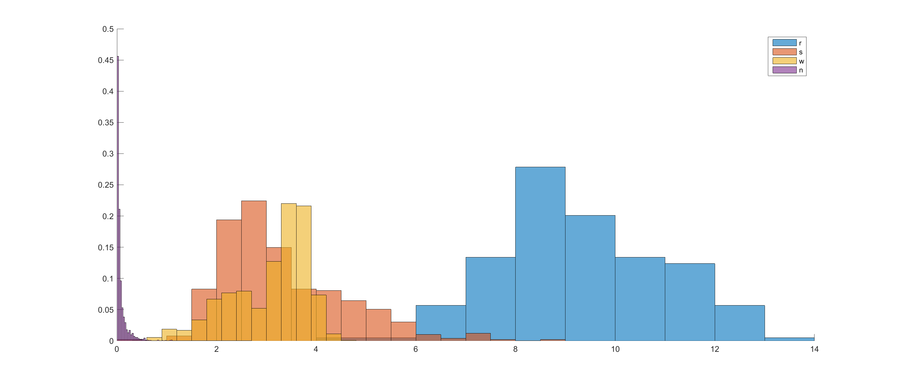
Энергия спектра позволяет хорошо отделить состояния стационарности и бега
от ходьбы и подьёма/спуска по лестнице. Дисперсия энергии спектра для ходьбы и
подьёма/спуска по лестнице является достаточно небольшой при удаленности средних
распределений в 20000.
Рис.4. Энергия спектра горизонтального ускорения.
По оси Y – вероятность, по оси X – рассчитанное значение указанной
характеристики. Синяя гистограмма (r) – бег, оранжевая (s) – подъём
или спуск по лестнице, песочно-жёлтая (w) – ходьба, фиолетовая (n) –
состояние покоя.
Дисперсия позволяет с очень высокой вероятностью разделить состояния
стационарности от какого-либо движения. При использовании данной характеристики
и классификатора типа "Дерево решений" можно значительно сократить число условных
переходов по дереву и число ветвлений.
Рис.5. Дисперсия магнитуды вектора ускорения.
По оси Y – вероятность, по оси X – рассчитанное значение указанной
характеристики. Синяя гистограмма (r) – бег, оранжевая (s) – подъём
или спуск по лестнице, песочно-жёлтая (w) – ходьба, фиолетовая (n) –
состояние покоя.
В данном алгоритме классификация типа движения производится при помощи
деревьев решений, так как они, несмотря на более низкую точность, обладают
высокой скоростью работы, использованием небольшого количества памяти и
простотой интерпретации результата.
Для тренировки дерева решений использовались предварительно промаркированные
данные из банков данных, находящихся в свободном доступе. Перед использованием
данные были отфильтрованы, были удалены лишние типы движения, а некоторые
стационарные типы, такие как "стояние", "сидение" и "лежание" были объединены
в один. Также в один тип были объединены типы движения подъёма и спуска по лестнице.
Общее время записи данных составило 23 минуты для ходьбы, 5 минут для бега,
11 минут для подъёмов и спусков по лестнице и 48 минут для состояния покоя.
Матрица ошибок для построенного дерева решений представлена в таблице ниже.
Расчётные типы
Покой
Ходьба
Лестница
Бег
Действительные типы
Покой
4024
20
2
0
Ходьба
11
1951
156
1
Лестница
1
218
614
14
Бег
0
0
7
382
Как видно, классификатор имеет очень высокую точность детектирования состояний
покоя (стационарности, куда отнесено сидение, стояние и лежание) и бега. Точность
определения ходьбы составляет более 90 %. Наибольшую проблему составляет
отделение подъёма/спуска по лестнице от ходьбы. Данная проблема легко решаема при
использовании датчика давления, который позволит надёжно отделить эти два состояния.
Тогда точность работы всего классификатора в целом приблизится к 100 %.